Proyecto

ÍNDICE
- Introducción
- Descripción
- Componentes del sistema
- Programación
- Simulación
- Archivos descargables
1. Introducción
El proyecto consiste en realizar el diseño, programación y simulación de una celda robotizada que se encarga del plegado de chapas rectangulares metálicas.
2. Descripción
1. Entra una chapa metálica en la celda robotizada a través de una cinta que las suministra constantemente.
2. El KR150 gracias a la ayuda de un eje linean coge la chapa y la coloca en la mesa de centrado
3. Coge la chapa de la mesa y la coloca en la plegadora para doblar uno de sus lados mediante tres vaivenes en vertical que son aplicados con fuerza que ejerce el robot.
4. Realiza una secuencia de plegado similar con el lado opuesto de la chapa
5. Ahora se dispone a plegar los dos lados restas, para ello los coloca en la plegadora y realizando los mismo movimientos anteriores efectúa el doblado. Después del primer doblado el robot suelta la chapa aun enganchada en la plegadora para cambiar de lado de sujeción y realizar otra secuencia de plegado.
6. El KR150 lleva la chapa de nuevo a la mesa de centrado para centrarla y realizar un nuevo agarre mas cómodo para el plegado del lado restante. Coge la chapa y la lleva a la plegadora para efectuar la secuencia nombrada dos veces aplicando la fuerza desde ambos lados.
7. Por último una vez afectado el plegado de todos los lados el robot coloca la chapa en una cinta distinta para su salida de la celda.
3. Componentes del sistema
1. Sistema robotico.
1. Sistema robotico.
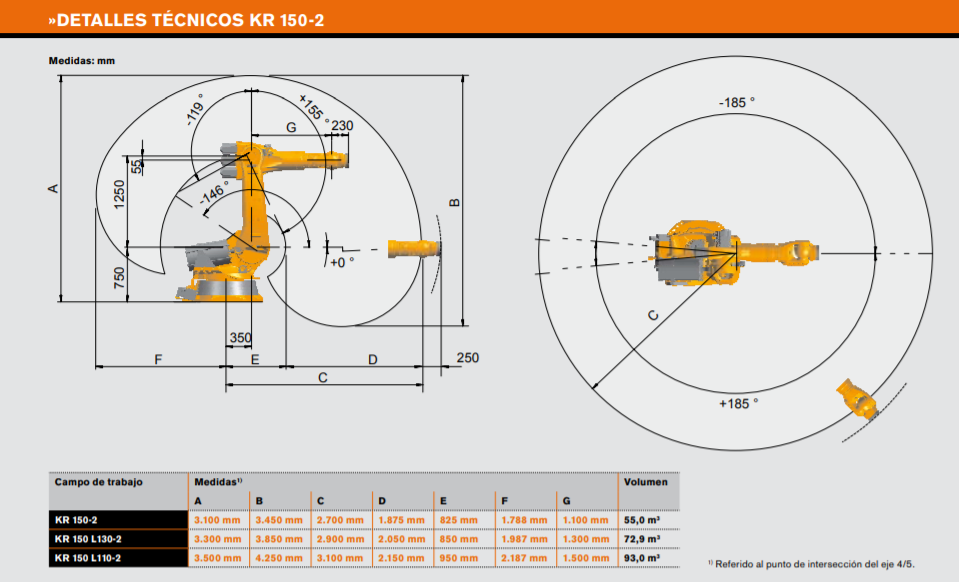
1.1. Robot KR150-2
Uno de los modelos más ligeros y rápidos de los robots industriales de 6 ejes de carga pesada de la serie S2000.


BASE[1]: Robot
BASE[2]: Mesa de centrado
BASE[3]: Plegadora
TOOL[2]: Chapa
TOOL[3]: Ventosas
1.2. Armario de control KRC4.
Actúa como cerebro del robot, por lo tanto es el encargado de controlar los movimientos y el correcto funcionamiento del robot y los elementos de seguridad de la celda.

1.3. Eje lineal.
Eje lineal sobre el que se sitúa el robot proporcionando un eje extra y un área de trabajo mayor.
 1.4. Herramienta final.
1.4. Herramienta final.
Es el actuador final que esta acoplado a la muñeca del robot. Consiste en 4 ventosas unidas para poder sostener con fuerza la chapa metálica.

2. Sistemas de seguridad
2.1. Celda de seguridad con cerradura
Se trata de un recinto cerrado por vallas metálicas donde se encuentra el sistema robotizado. Debe tener las dimensiones adecuadas para contener todos los elementos y la altura necesaria para que nadie pueda entrar. Mientras el proceso esta en marcha la puerta estará bloqueada, en caso de que alguien irrumpa en la celda el proceso deberá bloquearse por completo.

2.2. Seta de emergencia.
Pulsador de seguridad NC situado junto a la puerta de la celda. Cuando alguien accione el pulsador el proceso automatizada se detendrá inmediatamente.

2.3. Baliza de señalización.
Baliza compuesta de 3 luces de distintos colores para señalizar el estado de funcionamiento de la celda.

2.4. Cortina fotoeléctrica de seguridad.
Dos barreras fotoeléctricas situadas en cada cinta que contienen varios detectores dispuestos en linea que generan un haz de luz que es detectado por un dispositivo receptor. Esta disposición lineal hace que formen una cortina que detectará cuando un objeto opaco cruce a través de esta. En caso de que cruce un objeto ajeno a la cintas se detendrá el proceso inmediatamente.

2.5. Interruptor de seguridad
Cerrojo especial situado en la puerta de la celda que se encargar de bloquear la entrada cuando el proceso este en funcionamiento.

2.6. PLC de seguridad.
Es el encargado de controlar las entradas y salidas de los elementos de la celda. Tiene configuraciones especiales de hardware y software para detectar posibles fallos de funcionamiento externo o interno para asi evitar posibles accidentes derivados de un fallo de funcionamiento.

3. Otros elementos
3.1. Cinta transportadora.
Una cinta de entrada encargar de introducir la chapa metálica en la celda y una cinta de salida donde se colocara la chapa una vez finalizado el proceso de plegado.

3.2. Plegadora industrial
Maquina donde se ajustan los bordes de la chapa para su posterior plegado aprovechando la fuerza que aplica el robot.

Uno de los modelos más ligeros y rápidos de los robots industriales de 6 ejes de carga pesada de la serie S2000.

BASE[1]: Robot
BASE[2]: Mesa de centrado
BASE[3]: Plegadora
TOOL[2]: Chapa
TOOL[3]: Ventosas
1.2. Armario de control KRC4.
Actúa como cerebro del robot, por lo tanto es el encargado de controlar los movimientos y el correcto funcionamiento del robot y los elementos de seguridad de la celda.

1.3. Eje lineal.
Eje lineal sobre el que se sitúa el robot proporcionando un eje extra y un área de trabajo mayor.

Es el actuador final que esta acoplado a la muñeca del robot. Consiste en 4 ventosas unidas para poder sostener con fuerza la chapa metálica.

2. Sistemas de seguridad
2.1. Celda de seguridad con cerradura
Se trata de un recinto cerrado por vallas metálicas donde se encuentra el sistema robotizado. Debe tener las dimensiones adecuadas para contener todos los elementos y la altura necesaria para que nadie pueda entrar. Mientras el proceso esta en marcha la puerta estará bloqueada, en caso de que alguien irrumpa en la celda el proceso deberá bloquearse por completo.
Pulsador de seguridad NC situado junto a la puerta de la celda. Cuando alguien accione el pulsador el proceso automatizada se detendrá inmediatamente.

2.3. Baliza de señalización.
Baliza compuesta de 3 luces de distintos colores para señalizar el estado de funcionamiento de la celda.

2.4. Cortina fotoeléctrica de seguridad.
Dos barreras fotoeléctricas situadas en cada cinta que contienen varios detectores dispuestos en linea que generan un haz de luz que es detectado por un dispositivo receptor. Esta disposición lineal hace que formen una cortina que detectará cuando un objeto opaco cruce a través de esta. En caso de que cruce un objeto ajeno a la cintas se detendrá el proceso inmediatamente.

2.5. Interruptor de seguridad
Cerrojo especial situado en la puerta de la celda que se encargar de bloquear la entrada cuando el proceso este en funcionamiento.

2.6. PLC de seguridad.
Es el encargado de controlar las entradas y salidas de los elementos de la celda. Tiene configuraciones especiales de hardware y software para detectar posibles fallos de funcionamiento externo o interno para asi evitar posibles accidentes derivados de un fallo de funcionamiento.

3. Otros elementos
3.1. Cinta transportadora.
Una cinta de entrada encargar de introducir la chapa metálica en la celda y una cinta de salida donde se colocara la chapa una vez finalizado el proceso de plegado.
3.2. Plegadora industrial
Maquina donde se ajustan los bordes de la chapa para su posterior plegado aprovechando la fuerza que aplica el robot.

4. Programación
MAIN

Subrutina CHAPA_CENTRADO



Subrutina PLEGADO_CHAPA1

Subrutina PLEGADO_CHAPA2

Subrutina PLEGADO_CHAPA3

Subrutina PLEGADO_CHAPA4

Subrutina CHAPA_CINTA

5. Simulación
No hay comentarios:
Publicar un comentario